
In questo articolo ti parlo di un caso di studio: un rilievo con drone nelle 5 Terre a supporto di studi e progetti su importanti frane che hanno obbligato la chiusura della famosa “Via dell’Amore”.
Il lavoro è stato affidato da un Raggruppamento Temporaneo di Professionisti incaricati da IRE – Regione Liguria – di uno studio di fattibilità per sistemare i dissesti idrogeologici lungo un imponente versante nel Parco Nazionale delle Cinque Terre (La Spezia) e riaprire il sentiero pedonale chiuso per pericolo frana.
L’RTP era formato dalla società Flow-Ing s.r.l. , dal Geologo Carlo Malgarotto e dall’Agronomo Elena Lanzi (ENVI Area).
La Via dell’Amore è un suggestivo sentiero che collega, rimanendo in quota, i primi due borghi delle 5 Terre: Riomaggiore e Manarola. La sua prosecuzione, da Manarola a Corniglia, si chiama Sentiero Azzurro.
Da anni ormai questi percorsi sono chiusi per pericoli legati a frane e caduta massi dai versanti sopra di essi.
In questo lavoro abbiamo studiato la costa tra Manarola e Corniglia, dal livello del mare fino alla cima del tratto interessato dai dissesti.
Qui di seguito ti racconto che cosa ho fatto.
L’AREA
L’area studiata misura 65 ettari, ha uno sviluppo costiero di 1.500 m e un dislivello di 400 m.
E’ un versante parecchio pendente (pendenza media 45°-50°) con diversi dissesti idrogeologici diffusi: crolli in roccia e caduta massi, dilavamenti superficiali, frane attive, colate di detrito ed erosione marina.
La copertura vegetazionale è scarsa in basso, tra il sentiero e la spiaggia, ma è davvero rilevante dalle altre parti: macchia mediterranea e vigneti.
L’accessibilità è estremamente ridotta e solo pedonale.
Il Sentiero Azzurro attraversa il versante da Sud-Est a Nord-Ovest alla sua base, a circa 20-30 m di quota media.

CHE COSA USARE?
L’estensione dell’area, l’orografia e la scarsa accessibilità hanno guidato la scelta delle tecniche di rilievo: tecniche aerofotogrammetriche con l’uso di sistemi aerei a pilotaggio remoto (S.A.P.R.), insomma un rilievo con drone, integrato da misure GPS a terra.
Nonostante l’accuratezza di un rilievo aerofotogrammetrico sia inferiore rispetto ad altre tecniche (ho scritto qualcosa a riguardo in questo articolo) l’ho scelto perchè:
- il rilievo con drone ottiene un’alta densità di informazioni e molto più velocemente rispetto a stazione totale o GPS;
- un mezzo aereo rileva zone inaccessibili dalla strumentazione di terra o pericolose per i tecnici (aree in frana);
- l’aerofotogrammetria, basandosi sulle immagini, unisce al rilievo la possibilità di guardare e studiare le fotografie, utile ed efficace per aree inaccessibili e parecchio estese.
- i risultati del rilievo aerofotogrammetrico (ortofoto, DSM, modello 3D del terreno) sono interessanti per studiare e proporre gli interventi di sistemazione: danno una visione generale e complessiva dell’area, sono immediatamente fruibili (un’ortofoto è un’immagine visualizzabile da qualunque dispositivo elettronico), integrabili nei GIS e gestibili nei CAD.
- uno studio di fattibilità non richiede precisioni millimetriche, come per un progetto esecutivo.
CHE COSA HO USATO
IL DRONE
 Ho usato un drone DJI Phantom 4.
Ho usato un drone DJI Phantom 4.
Un multicottero a quattro eliche che pesa un chilo e quattrocento grammi e trasporta una fotocamera da 12 Mpixel ed ottica grandangolare.
Perchè ho scelto un drone così piccolo per un’area tanto vasta te lo spiego qui:
- Un drone piccolo decolla ed atterra in poco spazio o, addirittura, dalle mani del pilota. Qui le situazioni in cui il punto di decollo ed atterraggio erano comodi sono state pochissime e quasi ovunque c’erano polvere e terra al suolo, non buone per i motori quando le eliche le alzano. Gli spazi stretti dei sentieri hanno obbligato a decolli ed atterraggi a due metri da terra, dalle mie mani. Con un drone più grande e senza un’altra persona sul campo sarebbe stato problematico.
- Nonstante i droni ad ala fissa abbiano indubbi vantaggi per efficienza di volo e durata delle batterie, un multicottero è più agile nei movimenti. Può fare cambi di direzione e di quota in spazi ristretti e con immediata risposta ai radiocomandi. L’agilità di un multirotore è un pregio per un versante con marcato sviluppo verticale. Inoltre un multicottero può scattare facilmente non solo immagini nadirali (fotocamera puntata verso il basso) ma anche frontali ed inclinate a diversi angoli. Questo è importante per rilevare informazioni significative in un versante con pendenze alte.
IL GPS
Battere punti di riferimento (GCP: Ground Control Points) a terra è necessario per scalare ed orientare il modello elaborato. Il rilievo di appoggio l’ho fatto con un ricevitore satellitare a doppia frequenza in modalità Rover RTK (Real Time Kinematic) con correzione in tempo reale della posizione sulla base delle informazioni provenienti dalla rete di basi fisse Italpos.
LA CARTOGRAFIA
I sopralluoghi, la pianificazione delle operazioni e l’analisi dei risultati dei rilievi si sono sempre appoggiati a robuste basi cartografiche georeferenziate:
- La CTR vettoriale tridimensionale della Regione Liguria – in scala 1:5.000 (shapefile scaricabili gratuitamente dal portale cartografico regionale);
- il LIDAR con maglia 1×1 m del Ministero dell’Ambiente (ho scritto qui un articolo per l’acquisizione dei dati LIDAR)
IL RILIEVO CON DRONE
IL PIANO OPERATIVO
Il Regolamento ENAC sui mezzi aerei a pilotaggio remoto limita (in questo caso) il campo di azione di un drone ad un’altezza massima, dal punto di decollo, di 150 m e ad una distanza massima dalla stazione di terra di 500 m. Tutte le attività devono essere condotte in modalità “VLOS” (Visual Line of Sight), ossia il pilota deve sempre mantenere il contatto visivo con il drone in volo.
Se si aggiunge il fatto che la durata operativa di una batteria è di circa 17-18 minuti è evidente come il rilievo di un’area così vasta abbia richiesto un bel po’ missioni di volo.
I voli sono stati pianificati in modo che la distanza tra la macchina fotografica a bordo del drone ed il terreno fosse più o meno costante e circa pari a 70 m per un GSD (Ground Sampling Distance) di 2.5 cm/pixel (alcune informazioni sul GSD le trovi in questo articolo).
LE MISSIONI DI VOLO
Le missioni di volo le ho programmate secondo questi criteri:
- le fotografie hanno coperto tutta l’area studiata;
- visto lo sviluppo verticale del versante sono state scattate fotografie nadirali, fotografie con camera inclinata a 45° ed immagini frontali (queste solo per la parte rocciosa bassa, tra il Sentiero Azzurro e il mare);
- i punti di decollo erano tutti accessibili a piedi dal pilota (con scarponi, zaino, casco, bastoni e prudenza!);
- la sovrapposizione tra due foto consecutive è stata dell’80% e tra due “strisciate” adiacenti del 60%.
Le missioni di volo sono state precaricate all’interno del drone che ha volato in modo automatico.
- Il versante è stato diviso in 31 settori
- Sono state condotte 62 missioni per un totale di circa 6 ore di volo.
- I punti di decollo sono stai 20.
- Sono state scattate circa 5000 foto.
- Le operazioni sul campo sono durate 3 giorni.
Nelle immagini qui sotto trovi la suddivisione del territorio in settori con le relative missioni di volo e la posizione dei punti di decollo.


IL RILIEVO SATELLITARE
L’elaborazione fotogrammetrica ha bisogno di punti di controllo a terra di coordinate note per orientare e scalare il modello che verrà generato. La posizione dei punti deve essere rilevata con strumenti topografici ed io ho usato un GPS.
Una stazione totale permette precisioni maggiori di un GPS ma io l’ho scelto per questi motivi:
- velocità: mettere in stazione una stazione totale non è proprio veloce come mettere in bolla il GPS;
- praticità: la stazione totale ha bisogno di punti di coordinate note per conoscere la propria posizione assoluta e trasformare di conseguenza le coordinate dei punti battuti che, per altro, devono essere visibili dallo strumento, rendendo necessarie parecchie stazioni. Un ricevitore GPS, in RTK, necessita solo di una buona copertura satellitare visibile nella porzione di volta celeste sopra di esso ed una rete GSM;
- trasportabilità: la stazione totale è pesante ed ingombrante rispetto ad un GPS su palina e l’accessibilità dei luoghi, ridotta e solo pedonale su sentieri poco agevoli, avrebbe complicato il trasporto;
- operatori: la stazione totale ha bisogno di un operatore allo strumento e del canneggiatore che porta il prisma sui punti da battere: servono almeno due persone. Per il rilievo con GPS RTK basta un solo operatore che stazioni direttamente sul punto;
- La precisione sulla misura del GPS, dell’ordine di 5 cm circa, è più che sufficiente per il livello di dettaglio richiesto in uno studio di fattibilità.
Ho rilevato 26 punti di controllo a terra. Sedici (GCP Ground Control Points) sono stati usati nella fase di elaborazione del rilievo per l’orientamento del modello restituito e gli altri dieci (QCP Quality Control Points) sono stati utilizzati per verificare l’accuratezza finale dei risultati.
Non ho messo a terra marker ad alta visibilità ma ho scelto piuttosto di rilevare elementi fisici già sul campo, visibili dalle fotografie del drone. Posizionare target artificiali sarebbe stato più efficace per individuarli meglio nelle foto ma non ero certo che sarebbero rimasti in posizione per tutta la durata delle operazioni e distribuirli uniformemente in un’area così vasta avrebbe richiesto un giorno in più sul campo, oltre a quello necessario per il rilievo.
Per questo motivo il rilievo dei punti a terra l’ho fatto dopo i sorvoli con il drone. Dopo aver scattato tutte le foto ho visto quali erano gli elementi a terra ben visibili da battere (blocchi in cemento, pavimentazioni, spigoli di muri, …).
Qui di seguito trovi una planimetria con la posizione dei punti di controllo GCP (blu) e QCP (viola).


TRASFORAMZIONE DI COORDINATE E QUOTA
Le coordinate rilevate dal GPS a terra (come quelle registrate dal GPS del drone e associate a ciascuna immagine nei dati exif) sono riferite all’ellissoide WGS84 (codice EPSG: 4326): latitudine, longitudine e quota ellissoidica.
Per georeferenziare (qui un articolo sulla georeferenziazione) il rilievo nel sistema di riferimento cartografico scelto (Roma 40) e determinare la quota ortometrica (e qui un altro articolo sul problema della quota) dei punti a terra ho fatto le trasformazioni con il software Verto3K (IGM) usando il grigliato di trasformazione valido per l’intero foglio IGM della serie 50L – scala 1:50.000 248 – La Spezia.
ELABORAZIONE DEI DATI E RESTITUZIONE DEI RISULTATI
Finito il lavoro di campo (che è durato in tutto 5 giorni tra sopralluoghi, voli e rilievi GPS) inizia il trattamento dei dati e la restituzione dei risultati.
IL SOFTWARE
Per l’elaborazione del rilievo con drone ho usato il software Agisoft Photoscan che si basa sulla tecnologia structure from motion (SFM) per generare modelli tridimensionali a partire da immagini digitali e informazioni metriche. Non ti annoio con quello che c’è dietro alle tecniche SFM e ai principi di fotogrammetria per cui elenco solo i passaggi che ho fatto ed i risultati ottenuti.
ALLINEAMENTO DELLE IMMAGINI
Si caricano le immagini nel software che le allinea, ossia trova punti comuni tra di esse che servono per “agganciarne” una con l’altra.
Il risultato dell’allineamento è una nuvola di punti tridimensionale a scarsa densità: la nuvola sparsa.
La nuvola sparsa di questo lavoro conta di 3.300.000 punti.
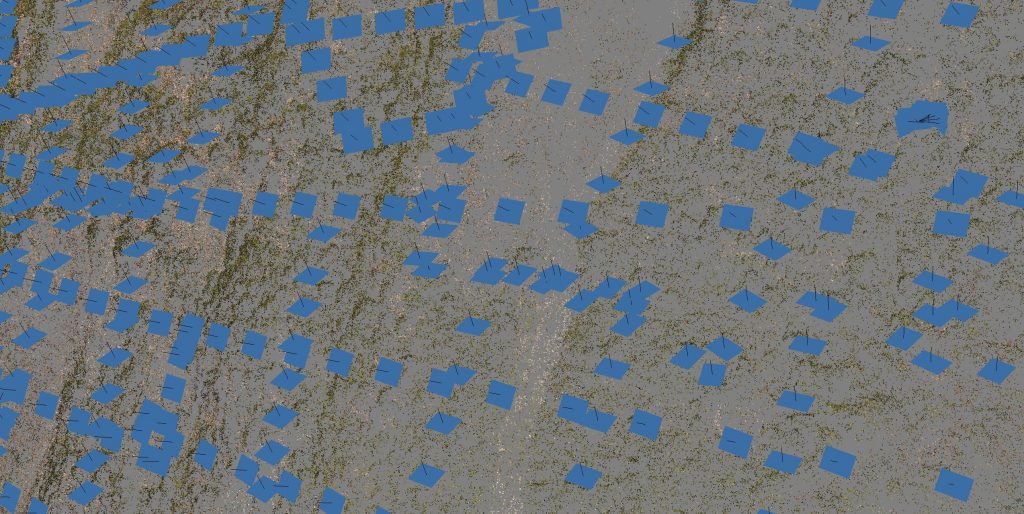
Qui sotto vedi un pezzetto della nuvola sparsa e la posizione delle fotografie scattate.
COORDINATE DEI PUNTI DI CONTROLLO
Nelle fotografie scattate si cercano i punti di controllo battuti a terra con il GPS e se ne inseriscono le coordinate.
La nuvola sparsa viene orientata e scalata correttamente sulla base dei GCP.
Con le coordinate dei punti di controllo si perfezionano anche alcuni parametri di orientamento delle singole fotografie.
LA NUVOLA DENSA
Questo è il passaggio che richiede più risorse hardware di ogni altra elaborazione: a partire dalla nuvola sparsa il software infittisce i punti comuni tra le immagini e genera una nuvola di punti densa tridimensionale, che è molto simile al risultato di un rilievo con laser scanner.
Questa nuvola di punti era davvero grande (27.000.000 di punti) ed è stata calcolata in una sessantina di ore di elaborazione.
La vedi qui sotto.

MESH & TEXTURE
Ciascun punto della nuvola di punti densa diventa ora il vertice di un triangolo e tutti i triangoli formano una maglia tridimensionale (mesh) di tutta l’area rilevata. La mesh viene poi vestita dal software con la texture grafica ricavata dalle fotografie scattate. Si crea così un modello tridimensionale realistico.
Immagina la mesh come un manichino, la struttura e la forma, e la texture come il vestito che lo ricopre, il colore, i particolari e le informazioni.
Le facce della mesh triangolare sono state 5.400.000 e la texture ha una risoluzione di circa 3 cm per pixel di immagine.


ACCURATEZZA DEI RISULTATI
Tramite il confronto con le coordinate dei punti di controllo della qualità QCP (Quality Control Points) rilevate a terra e le coordinate resituite per gli stessi punti dal modello tridimensionale si può stimare l’accuratezza media del risultato.
Per questo lavoro si è stimata un’accuratezza planimetrica di 10 cm ed un’accuratezza altimetrica di 15 cm.
MODELLO DIGITALE DELLA SUPERFICIE
A questo punto il modello tridimensionale dell’area rilevata è fatto.
Eccolo qui sotto.
Da qui in poi si ricavano informazioni e strumenti da utilizzare nelle successive fasi di studio, analisi e proposta degli interventi.
Uno di questi è il Modello Digitale della Superficie (D.S.M. – Digital Surface Model).
Non si tratta del più famoso D.T.M. (Modello Digitale del Terreno) perchè il DSM descrive tutte le superfici rilevate (inclusi alberi, cespugli, case), non solo il terreno.
Il DSM ricavato ha una risoluzione di 30 cm/pixel ed è interessante per ricavare informazioni topografiche (ad esempio le curve di livello) significative nelle falesie rocciose, nelle aree di frana attiva e lungo spiagge e scogliere.
Il DSM è georeferenziato ed immediatamente utilizzabile dentro gli strumenti GIS.

ORTOFOTO
L’ortofoto è un altro risultato interessante dell’elaborazione del modello tridimensionale da rilievo con drone.
Un’ortofoto permette di fornire informazioni aggiornate ad alta risoluzione di tutta l’area rilevata e, dato che anch’essa è georeferenziata, può essere usata all’interno di GIS e CAD come utile strumento di supporto alla progettazione.
Oltre all’ortofoto nadirale (qui un articolo sulle ortofoto) si ricavano anche viste assonometriche, anch’esse utili per una visione generale ed aggiornata del versante rilevato.



INFINE…
Se sei arrivato a leggere fino a qui ti ringrazio!
Questo articolo è stato lungo, il lavoro è stato importante ed imponente e le cose che ti ho voluto raccontare non sono state poche.
Grazie davvero per il tuo interessamento!
Concludo con alcune considerazioni e brevi pillole finali su quello che ho fatto e che ho imparato in questo bellissimo lavoro:
- Il lavoro è durato sei giorni di campo (due di sopralluoghi, tre di sorvoli e uno di misure GPS) ed altrettanti per l’elaborazione dei risultati in ufficio (escluso il tempo macchina per i calcoli nella modellazione tridimensionale), oltre alla pianificazione accurata di tutte le missioni di volo (altri due giorni);
- I rilievi li ho fatti a Giugno 2017;
- Con i droni e l’aerofotogrammetria una persona sola può rilevare ampie superfici anche parecchio pendenti;
- Una delle fasi più importante del lavoro sono stati i sopralluoghi di campo e la pianificazione delle missioni di volo. Sbagliare questa attività vuol dire impiegare sul campo molto più tempo del necessari, scattare troppe o troppo poche fotografie o rilevare a terra punti non significativi;
- Non è vero che con un drone da grande distribuzione come il Phantom 4 non si possa lavorare per ottenere risultati professionali ed affidabili;
- Tutti i voli sono stati autorizzati dal Parco delle Cinque Terre (grazie al Direttore Patrizio Scarpellini e a Lorena Pasini – ufficio tecnico del Parco – per la disponibilità ed il supporto);
- Ho camminato complessivamente per poco meno di 60 km;
- E’ stato davvero bello stare tanto ed a lungo in mezzo alla natura godendo dei panorami mozzafiato delle Cinque Terre e di questo mi sento privilegiato.
Spero di averti dato informazioni utili o interessanti su quello che si può fare in un rilievo con drone.
Per qualsiasi domanda o dubbio sentiti libero di farti sentire come preferisci: o qui sotto nei commenti o tramite i miei contatti diretti che trovi nella sezione Contatti o sui canali Social Network che trovi in fondo alla pagine Chi Sono.
A presto!
Paolo
Lascia un commento