In questo articolo ti scrivo di un altro test di rilievo aerofotogrammetrico per valutare ancora se si può fare fotogrammetria con lo Spark, il drone trecentino di casa DJI.
In questo articolo di qualche settimana fa avevo portato un caso di studio in cui confrontavo un rilievo aerofotogrammetrico fatto con il drone DJI Spark con quello fatto da altri due droni: un DJI Phantom 4 Pro ed un iDRONI Venture Mapper.
Ho rilevato la solita area con i tre droni, nelle solite condizioni (non proprio, ma vabbè…), per valutare l’effettiva possibilità di usare lo Spark in fotogrammetria professionale.
Non solo per la ricostruzione tridimensionale ma anche per rilievi topgorafici e mappatura del territorio, dove le informazioni metriche e geografiche sono imprescindibili e fondamentali.
E il piccolo drone si è comportato bene!
L’ambito del primo test/rilievo è stato una parte di una cava di escavazione di inerti con prevalente sviluppo planimetrico-orizzontale.
Un caso piuttosto semplice.
Alla fine di quell’articolo avevo promesso che avrei provato di nuovo a fare fotogrammetria con lo Spark anche in altri scenari, magari più complessi.
Ed eccoci qui.
UNA PARETE DI ROCCIA ALLE 5 TERRE
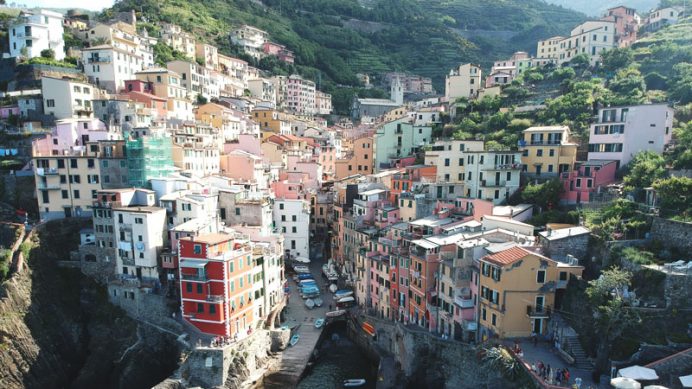
Il rilievo di questo articolo riguarda una piccola parete di roccia nello scalo marittimo di Riomaggiore, uno dei borghi delle 5 Terre, in Provincia di La Spezia e dentro l’omonimo Parco Nazionale.
Ero lì per lavoro.
Dovevo rilevare un fronte verticale interessato da fratturazioni nella roccia che sta al di sotto della passeggiata pedonale e a monte della scogliera e della zona dello scalo a mare.
Lo scopo del rilievo era quello di supportare la progettazione delle opere di difesa da possibili crolli di roccia e protezione delle aree fruite da turisti ed abitanti del borgo.
Ho fatto il rilievo, per cui sono stato incaricato, con il mio Phantom 4 Pro ed al termine delle operazioni ho fatto volare anche lo Spark per rilevare, anche con lui, una parte dell’area studiata.
Lo sviluppo lineare del fronte rilevato è di circa 100 m.
Il punto più alto è a circa 15 m s.l.m., mentre il più basso corrisponde al livello del mare.
Qui sotto puoi vedere una foto aerea di inquadramento dell’area rilevata.

In realtà non è proprio tutta roccia e pietra.
Nel tratto più a nord (a sinistra della foto) le roccie lasciano il posto a strutture artificiali in pietra e muratura ed a un paramento in calcestruzzo armato.
Nella porzione centrale ed in quella meridionale (centro e destra della foto) il fronte naturale è interrotto, in due occasioni, da scalinate in pietra che scendono al mare.
In alcuni punti le strutture in muratura hanno qualche segno di fratturazione e cedimento e nell’ammasso roccioso centrale ci sono un paio di “bubboni” aggettanti, forse pericolosi.
Il Comune di Riomaggiore ha programmato la messa in sicurezza delle aree.
Che parte dal progetto di fattibilità preliminare.
Che si basa sul rilievo topografico.
UNA VALUTAZIONE COMPARATIVA
Anche per questo caso di studio ho fatto un confronto tra due rilievi della stessa aerea, fatti (più o meno) nelle stesse condizioni, con due droni diversi: il DJI Phantom 4 Pro e il DJI Spark.
Credo che l’analisi comparativa aiuti a valutare pregi e difetti di un metodo o di uno strumento, rispetto ad un altro.
Il Phantom ha rilevato tutta l’area da studiare, come da incarico.
Con lo Spark, per limitare il numero di fotografie e contenere i tempi di elaborazione, ho volato su un’area più piccola.
Qui sotto vedi le differenze tra le aree coperte in un caso (Phantom – rosso) e nell’altro (Spark – verde).

IL METEO
Nel primo articolo che ho scritto per valutare se si può fare fotogrammetria con lo Spark avevo dimenticato di inserire le condizioni meteorologiche!
Il meteo ha grande importanza per il volo dei droni, specialmente se si usano macchine piccole che subiscono parecchio le perturbazioni delle raffiche di vento.
Ho fatto questo rilievo il 29 Maggio 2018 tra le 7 e le 10 di mattina.
Le condizioni meteo erano ottime: temperatura mite e assenza di vento.
La zona del rilievo non è mai stata esposta direttamente ai raggi del sole che le sorgeva alle spalle, dietro le colline della costa ligure di levante.
IL VOLO
È stato manuale.
In casi del genere, dove la verticalità degli elementi da rilevare è preponderante sull’estensione planimetrica e le condizioni orografiche e morfologiche dei luoghi sono complesse, non è semplice (a volte è quasi impossibile) programmare delle missioni di volo da fare eseguire automaticamente al drone.
Preferisco pilotare il drone “a mano” (con assistenza della strumentazione di bordo, GPS, accelerometri, bussola, altimetro), valutando la sovrapposizione tra fotogrammi (consecutivi ed adiacenti) sulla base delle immagini che la fotocamera del drone invia, in tempo reale, alla stazione di controllo di terra.
È un po’ più complicato che non far fare tutto al drone, in modo automatico, ci vuole un po’ più di esperienza sul campo, si rientra in ufficio con più foto rispetto a quelle di una missione programmata, ma si riesce comunque a fare.
Ed in questi casi è meglio e più sicuro (per tutti!).
FOTOGRAFIE E G.S.D.
3 DIVERSI DATASET FOTOGRAFICI
Per caratterizzare, rilevare e modellare bene un elemento principalmente verticale non sono sufficienti le sole foto nadirali, cioè quelle fatte con l’asse ottico della fotocamera che punta dritto verso il basso.
Servono anche altri “dataset” di immagini.
Di solito si scattano anche foto con camera inclinata di 45° rispetto all’orizzonto e, per pareti verticali come questa, anche foto “orizzontali” o “frontali”.
È importante fotografare e vedere bene (nelle fotografie) gli elementi caratteristici delle parti “in piedi“.
Forme, elementi, dimensioni…
Diversamente, non saranno modellate bene.
Sia con il Phantom che con lo Spark ho scattato fotografie nadirali, fotografie inclinate di 45° sull’orizzontale e fotografie frontali della parete e della zona immediatamente a monte e al piede.
G.S.D.
Il G.S.D. (Ground Sampling Distance) in aerofotogrammetria definisce la risoluzione a terra di un’immagine.
Minore è il GSD e più dettagliata è un’immagine.
Non entro nel dettaglio del GSD perchè l’articolo diventerebbe troppo lungo ma mi permetto di rimandarti a questi post che trovi qui: aerofotogrammetria su Terreni inclinati e Ground Sampling Distance, dove trovi spiegato un po’ meglio il concetto di GSD ed il perchè è importante in fotogrammetria.
Il GSD dovrebbe rimanere il più possibile costante tra tutte le foto di un rilievo fotogrammetrico, per avere consistenza di dettagli e di informazioni tra una e l’altra.
Se programmi una missione di volo automatica per foto nadirali su un terreno pianeggiante non è difficile scattare foto con lo stesso GSD.
Ma se voli a mano e scatti anche foto diverse dal nadirale non è banale avere un GSD costante.
Ci provo sempre, ma difficilmente ci riesco.
Con il Phantom ho rilevato con abbastanza cura tutta la parete verticale e le zone al di sopra ed al di sotto.
Ho scattatato anche delle foto piuttosto ravvicinate di alcune porzioni di muratura fratturata per poterle restituire con sufficiente grado di dettaglio, nel modello tridimensionale finale.
Il Phantom è stato ad una distanza media di 25 m da suolo/parete, per un GSD di 7 mm/pixel.
Il rilievo dello Spark è stato un po’ più generale e veloce.
Non ho scattato foto di dettaglio ma solo immagini per modellare tridimensionalmente l’area indagata.
La distanza media che lo Spark ha tenuto dal terreno è stata di circa 35 m per un GSD di 1.5 cm/pixel.
In effetti anche in questo caso le condizioni operative del volo dei due droni non erano proprio le stesse…
Quando volo “a mano libera” disattendo spesso le previsioni progettuali sul GSD.
Solitamente finisco per scattare immagini da una distanza minore da quella prevista.
Il GSD è più piccolo, e fino a qui tutto bene, ma le foto da elaborare ed archiviare sono di più.
Per fotografie nadirali, anche in assenza di piano di volo, la telemetria che leggi nei dispositivi della stazione di terra (soprattutto l’altezza del drone in volo ma anche la velocità di crociera, la distanza dalla stazione di controllo, la direzione della prua) aiutano a mantenere costante la distanza drone-terreno e quindi anche il GSD.
Per foto inclinate e frontali serve un po’ più di esperienza.
E non sempre è sufficiente.
Ho scattato 430 foto con il Phantom e 150 con lo Spark.
Non lasciare che ti “caschino le braccia” per dei numeri così diversi.
Il Phantom ha scattato molte foto ravvicinate per caratterizzare con grande dettaglio alcune porzioni murarie.
Lo so, avrei dovuto toglierle e elaborare il modello con le foto rimanenti prese da più distante.
Non l’ho fatto per evitare una nuova elaborazione e l’attesa del tempo necessario per i risultati.
Ti prometto che il prossimo test sarà più rigoroso!
E poi il Phantom ha rilevato un’area più grande rispetto allo Spark.
Qui sotto vedi la posizione delle foto scattate (a sinistra quelle del Phantom e a destra quelle dello Spark)
Sembra un casino totale ma tieni conto che qui dentro ci sono le posizioni dei punti di presa sia delle foto nadirali, che di quelle inclinate a 45° sull’orizzontali e di quelle frontali.
Questi ultimi due dataset poi hanno anche foto scattate ad altezze diverse, per seguire lo sviluppo verticale della parete.

DNG vs JPG
Ti dico l’ultima cosa sulle fotografie che ho scattato.
Ho registrato le foto del Phantom in formato RAW che poi ho trattato in post-elaborazione per ottimizzarle prima dell’elaborazione fotogrammetrica (ho scritto un articolo sull’editing dei file RAW per il processo fotogrammetrico, lo trovi qui).
Le foto dello Spark invece sono file registrati direttamente in JPG sulla scheda di memoria a bordo del drone e non hanno subito nessun fotoritocco.
Anche se non ti so quantificare con precisione le differenze tra l’elaborazione di file RAW ottimizzati e l’elaborazione degli stessi JPG (ci farò un articolo nel prossimo futuro!), ci sono indubbiamente delle differenze tra numero di punti di legame (matching points) e densità della nuvola densa.
Ancora una volta ti chiedo di chiudere un occhio sullo scarso rigore del test…
I PUNTI DI VINCOLO E DI CONTROLLO
Qui invece ho fatto le cose per bene!
🙂
Ho usato un po’ più di punti di vincolo a terra rispetto a quelli che ho usato nel primo test con lo Spark, il caso della cava di cui ti ho scritto prima.
Ho posizionato a terra 19 target artificiali ad alta visibilità.
Per il rilievo con il Phantom ne ho usati 13 per l’orientamento interno ed esterno delle immagini e del modello e per la georeferenziazione, i G.C.P. (Ground Control Point), e 6 per il controllo dell’accuratezza generale, i Q.C.P. (Quality Control Point).
All’interno dell’area rilevata con lo Spark ci sono finiti 14 target, di cui 10 li ho usati come G.C.P. e 4 come Q.C.P..

Ho distribuito i target in modo il più possibile omogeneo, sia in pianta che in elevazione.
Sfruttando la passeggiata pedonale che sta sopra la parete studiata, ho potuto mettere dei target anche lì senza ricorrere all’uso della stazione totale per battere punti ai limiti superiori dell’area del rilievo.
Ho rilevato le coordinate dei punti a terra con un ricevitore satellitare GNSS in modalità NRTK.
I punti hanno una precisione media sulla misura di circa 5 cm.
ELABORAZIONE FOTOGRAMMETRICA SfM
Non mi dilungo molto sulla spiegazione dell’elaborazione fotogrammetrica ad algoritmi Structure from Motion.
Ti dico solo che ho usato di nuovo il software Agisfot Photoscan Pro ed ho tenuto le stesse impostazioni per l’elaborazione delle foto scattate da un drone e dall’altro.
Ho fatto prima l’elaborazione delle foto del Phantom, per necessità di consegna, e poi ho applicato le stesse impostazioni sulle foto dello Spark.
Se ti va di approfondire l’elaborazione fotogrammetrica con il software Photoscan, in questo blog c’è una rubrica tenuta dall’Ing. Paolo Rossi, della facoltà di Ingegneria della Facoltà di Modena e Reggio Emilia, che entra nel dettaglio di tutti gli step del processo.
Ti metto il link all’ultimo articolo (ultimo mentre scrivo questo articolo) della serie.
Lo trovi qui.
Da lì puoi andare a tutti gli altri pubblicati sino ad ora.
ANALISI DEI RISULTATI
Per valutare in modo significativo i risultati ottenuti dai due rilievi ho ristretto il modello tridimensionale generato dall’elaborazione delle fotografie del Phantom all’area coperta dallo Spark.
ALLINEAMENTO DELLE IMMAGINI
Il parametro di accuratezza dell’allineamento impostato in Photoscan è stato Alto (High).
L’elaborazione delle foto del Phantom ha “trovato” 185.000 punti di legame (matching points), quella dello Spark ne ha individuati 80.000.
100.000 punti di legame in meno non sono per niente pochi!
Questa differenza è dovuta al fatto che il GSD medio delle immagini del Phantom è più basso di quello dello Spark, che le immagini scattate in RAW sono state ottimizzate per l’elaborazione fotogrammetrica e che ho fatto foto molto ravvicinate in alcuni punti della parete rocciosa, aiutando a tirare fuori dettagli più significativi per agganciare le foto una all’altra.
NUVOLA DENSA
La nuvola densa l’ho elaborata impostando la qualità Media e la modalità di filtraggio (depth filtering) Mild.
I punti del modello tridimensionale generato dalla foto del Phantom sono 4.500.000 mentre quelli del modello fatto con le foto dello Spark sono 2.000.000.
La differenza tra il numero di punti delle nuvole dense si attesta sul solito rapporto dei punti di legame.
I punti del modello del Phantom sono 2.3 volte di più rispetto a quelli del modello dello Spark.
Le cause sono di nuovo imputabili in tutto e per tutto alle stesse che ti ho descritto poco sopra.
A questi link puoi vedere le due nuvole di punti che ho caricato online.
Ho convertito i file LAS con Potree Converter ed ho caricato i file che ha creato all’interno di uno spazio sul mio dominio.
Nuvola di punti dalle foto del Phantom 4.
Nuvola di punti dalle foto dello Spark.
Puoi esplorare le nuvole, ruotarle e zoomarle, e puoi anche interrogarne le coordinate dei punti, misurare distanze e aree e tracciare sezioni con gli strumenti del menù che vedi aperto a sinistra.
MESH TRIDIMENSIONALE E TEXTURE
La mesh tridimensionale triangolare del modello fatto con le foto del Phantom conta circa 420.000 facce mentre quella fatta con le foto dello Spark ne conta circa 380.000.
La texture generata dalle foto del Phantom ha una risoluzione di 2.5 cm/pixel mentre quella ricavata dalle foto dello Spark è di circa 3.4 cm/pixel.
Qui sotto trovi i due modelli solidi e texturizzati caricati su Sketchfab.
Se zoomi sulla parete ti accorgi di un po’ di differenza tra un modello e l’altro, anche se entrambi riproducono in maniera analoga e fedele la geometria dei luoghi.
ORTOFOTO
In un caso come questo, dove l’oggetto del rilievo è un elemento verticale, ha più interesse produrre ed esportare un ortomosaico ad alta risoluzione della vista (o delle viste) frontale della parete (dove ci sono gli elementi interessati dal progetto delle opere di difesa), piuttosto che la “classica” ortofoto nadirale.
Qui sotto ti faccio vedere il confronto tra due ortomosaici frontali ricavati dal modello fatto con le foto del Phantom e quello fatto con le foto dello Spark.
Prima ti faccio vedere l’immagine completa (considera che quella relativa alle foto del Phantom abbraccia un’area più grande) e poi ti metto due ingrandimenti al 100% della solita parte.




Anche in questo confronto è evidente come la definizione dell’immagine generata dalle foto del Phantom sia maggiore.
Considera ancora il fatto che il GSD medio dei due rilievi non era lo stesso ma era superiore per le foto scattate dallo Spark (e che quindi hanno una definizione inferiore).
ACCURATEZZA GENERALE
L’analisi dell’accuratezza generale dei due modelli tridimensionali, elaborati e restituiti, calcolata sulla base della stima degli scarti quadratici medi di punti di controllo (QCP) fornisce un valore di 5.3 cm per il modello fatto con il Phantom e 5.7 cm per quello fatto con lo Spark.
E questo credo che sia un risultato davvero interessante per la possibilità di fare fotogrammetria con lo Spark anche in ambiti più complessi!
Al netto del GSD delle immagini, della densità dei punti della nuvola tridimensionale e della risoluzione della texture digitale, è stato comunque possibile ricostruire un modello tridmensionale, fedele e rappresentativo dei luoghi studiati, con un’accuratezza generale del tutto paragonabile a quella stimata per l’altro modello.
Per altro, questo valore dell’accuratezza è anche rispondente alle esigenze del committente per lo studio dei fenomeni in corso e la progettazione degli itnerventi.
Ottimo lavoro Spark!
🙂
CONCLUSIONI
Anche questo test è arrivato alla fine.
Grazie per esserci arrivato anche tu!
Devo ammettere che anche questo test comparativo, così come il primo fatto nella cava di inerti, è stato abbastanza test ma non molto comparativo.
Le condizioni delle acquisizioni fotografiche dei due droni in volo non sono state le stesse.
C’erano delle differenze e neppure troppo trascurabili.
Ti confesso che ci ho preso gusto a fare questi test e scriverò un altro articolo su un rilievo di una piccola area totalmente pianeggiante dove si possono davvero paragonare metodi e mezzi a confronto nelle stesse condizioni!
Ma se torniamo a questo caso di studio posso concludere che:
- Lo Spark si è comportato molto bene anche in un caso morofologicamente complesso, dove era necessario acquisire informazioni fotografiche divise in diversi dataset, da elaborare insieme.
- Vale sempre quanto detto per il primo test: se devi rilevare un’area vasta non credo che lo Spark sia la scelta tecnica migliore.
La sua fotocamera è meno performante rispetto a quella di altri droni più grandi e per avere lo stesso GSD devi volare più vicino all’oggetto da modellare, che vuol dire fare più foto, che poi devi elaborare (tempi più lunghi) ed archiviare su disco.
Un drone piccolo, come lo Spark, ha anche dei limiti oggettivi sull’autonomia della batteria e se le aree sono grandi ne servono parecchie per coprirle tutte. - Però lo Spark ha il vantaggio che in uno scenario come questo si può usare anche con la presenza di persone a terra non interessate dalla operazioni.
Il rilievo con il Phantom l’ho fatto alle 7 di mattina quando in zona c’erano pochissime persone, che si sono potute controllare grazie all’aiuto dei tecnici del Comune di Riomaggiore.
Il rilievo con lo Spark l’ho fatto più tardi, quando iniziavano ad esserci un po’ più di persone in giro, tra turisti e locali.
Non erano assembrate, ma non erano poche e, a tutti gli effetti, erano lì.
Con lo Spark (alleggerito ed inoffensivo) ho potuto volare (e rilevare) senza dovermi preoccupare (non è andata proprio così!) delle persone sulla passeggiata.
Quinsi, se devi fare un rilievo in uno scenario in cui il “fattore umano a terra” non è per niente trascurabile, un mezzo inoffensivo può essere davvero una risorsa utile e interessante. - Ed infine c’è da segnalare che l’accuratezza restituita dal modello fatto con le foto dello Spark è assolutamente paragonabile a quella del Phantom.
Questo permette di avere un dato topografico solido, robusto e valido su cui fare analisi di pericolosità, estrarre sezioni e profili, programmare e progettare interventi su una buona base di partenza!
Quindi, alla luce di questo nuovo test, mi sento di continuare a dirti che, anche se con i suoi (non pochi!) limiti si può fare fotogrammetria con lo Spark!
Spero di averti dato altri spunti o contenuti interessanti su questo tema.
Prometto che il prossimo test sarà più rigoroso!
Per dubbi, domande o approfondimenti non esitare a scrivere nei commenti qui sotto.
E vale anche se ti vengono in mente considerazioni su questo argomento.
In questi giorni si parla molto del competitor dello Spark di casa Parrot, l’Anafi.
Sarebbe interessante poter riuscire a fare un confronto tra questi due droni.
Se ne hai uno e ti va di fare un test insieme scrivimi!
A me fa piacere.
Grazie ancora per il tuo tempo e per essere arrivato a leggere fino a qua!
A presto!
Paolo Corradeghini
Lascia un commento