

In questo articolo ti racconto di un rilievo fatto con un LiDAR montato a bordo di un drone per la caratterizzazione topografica e morfologica di un promontorio sulla costa ligure di levante.
E, già che ci sono, faccio anche un confronto con il rilievo della stessa area fatto con aerofotogrammetria, sempre da drone.
PARLIAMO DI LiDAR
Il principio del LiDAR (Light Detection And Ranging) è lo stesso del laser scanner.
Sono sensori attivi per il rilievo 3D.
L’emettitore manda in giro milioni di esploratori (raggi laser) che viaggiano nello spazio fino ad incontrare qualcosa.
Qualsiasi cosa che gli permetta di rimbalzare e tornare indietro al punto di partenza.
Ogni scout sa il momento (tempo 0) in cui è partito.
Si conosce la sua velocità di propagazione nel mezzo che attraversa (aria).
E quando rientra alla base si ferma il cronometro e si calcola, subito, lo spazio percorso.
La formula è semplice: S = V * t
E va divisa per 2 perchè c’è stata un’andata ed un ritorno.
Nota la posizione (coordinate X,Y,Z) dell’emettitore, sono note anche le coordinate (x,y,z) dei punti su cui hanno sbattuto.
E sono milioni.
Il principio è questo ma la realtà dei fatti è un po’ diversa.
E più complicata.
Spero comunque che ti possa bastare…
Un laser scanner terrestre (TLS) è fermo.
Ed è tutto ok.
Un LiDAR invece è pensato e progettato per fare tutto questo in movimento.
La posizione del punto di partenza del laser è diversa da quella del ritorno.
Ed è un vero casino!
L’emettitore, da solo, non basta più.
Serve qualcosa che permetta di sapere, sempre, la posizione del punto di partenza e di ritorno di tutti i raggi.
Ci pensa il sistema inerziale, che può essere collegato anche ad un’antenna GNSS per riceverne le posizioni assolute.
Ci sono LiDAR che si montano su un drone in volo (come quello di questo rilievo) ed arrivano a battere punti dove a piedi non ci puoi andare.

Ce ne sono altri che ti metti in spalla, come uno zaino (sono proprio uno zaino) o tieni in mano come una torcia, integrano al loro interno la tecnologia SLAM (Simultaneous Localization And Mapping – di cui però non è che sappia dirti proprio molto), e ti permettono di mappare aree strette, chiuse ed anguste dove puoi passeggiare (ma non volare).

Altri ancora li monti su automobili, su aerei o su elicotteri e copri lunghissime distanze e superfici sfruttando la velocità dei mezzi che li portano.

Sono strumenti davvero “potenti”.
Ed ancora un po’ sconosciuti a tanti.
LiDAR E LASER SCANNER A CONFRONTO
Anche se il principio di misura è il solito, i risultati di un rilievo laser scanner TLS e LiDAR possono essere diversi.
E non poco.
Il mondo del laser scanning terrestre è davvero vasto (ed in continua crescita).
Ci sono strumenti che arrivano lontanissimo (anche km) ed altri che emettono una quantità impressionante di punti.
Pertanto, per necessità, devo generalizzare un po’.

La misura di un laser scanner terrestre è più precisa.
Alcuni arrivano “al millimetro”.
Un LiDAR (nel momento in cui scrivo) è indietro di un ordine di grandezza circa.
Si parla di centimetri.
Il risultato di entrambe i rilievi è la (famosa) nuvola di punti.
Quella di un LiDAR è un po’ più rumorosa ed ha bisogno di un po’ di tempo nella fase di elaborazione.
Inoltre serve fare un po’ di attenzione per trattare di dati registrati e “ricostruire” il percorso dello strumento durante il rilievo.
Tuttavia il LiDAR, per il fatto che si muove ed emette tantissimi raggi nello spazio, ha un potere di penetrazione della vegetazione ed aggiramento degli ostacoli altissimo.
Se fai un rilievo topografico è probabile che tu voglia arrivare al dato del terreno.
Con un LiDAR è probabile che tu ci possa riuscire.
Non sempre, è ovvio, ma spesso succede.
Immagina di avere un albero con la sua chioma di foglie e di volarci sopra con un LiDAR a bordo di un drone…
Se il punto di emissione fosse uno e fermo, foglie e rami sarebbero un ostacolo.
E creerebbero delle ombre sui punti a terra.
Se la vegetazione è fitta è probabile che a terra ci arrivino davvero in pochi.
Ma il punto di partenza cambia sempre.
E quello che non si vedeva prima, si può vedere dopo, spostandosi un po’.
Il principio è quello della “colonna”.
Se ti metti dietro ad una colonna, quello che sta al di là non lo vedi.
Ma se ti muovi, la scena si svela sempre di più e riesci a vedere cose prima nascoste.
Se a questo ci aggiungi il fatto che i punti emessi sono milioni e che alcuni LiDAR hanno anche la possibilità di registrare più di un ritorno (superando le difesa dei primi deboli ostacoli che si possono incontrare), forse ti è più facile capire come il potere di penetrazione degli ostacoli (e su tutti la vegetazione) sia altissimo!
Ed è proprio la proprietà che abbiamo sfruttato nel rilievo di cui ora, finalmente, ti scrivo.
IL PROMONTORIO
Non è che possa dirti tantissimo sull’area del rilievo.
Per rispetto ed accordi con il committente, per la sua tutela e la sua privacy.
Però cercherò di darti qualche informazioni per aiutarti ad inquadrare al meglio il lavoro.
Golfo di La Spezia.
E’ profondo, il golfo naturale più profondo del Mediterraneo.
E ci sono un sacco di calette e promontori.
Ecco, il rilievo ha riguardato uno di questi.
Questo qui sotto, per la precisione.

IL RILIEVO
Lo scopo del rilievo era quello di caratterizzare topograficamente l’area di proprietà, per progettare interventi di sistemazione contestuali ad una ristrutturazione edilizia.
La superficie non era enorme, 6/7 ettari.
Misurati in pianta.
Ma era (quasi) totalmente coperta da vegetazione.
E non era di un tipo “accomodante” (tipo i faggi in inverno) ma macchia mediterranea (lecci), sempreverde e con sottobosco abbastanza fitto.


Se la unisci a versanti pendenti, rocce affioranti ed aree inaccessibili viene fuori l’incubo del topografo.


Un rilievo GNSS sarebbe stato tempo perso.
La vegetazione era troppo fitta anche per i più moderni ricevitori.
Un rilievo aerofotogrammetrico ti avrebbe restituito solo le chiome degli alberi (e dopo ti mostro un confronto diretto).
Usare un laser scanner terrestre avrebbe significato dover fare un numero folle di scansioni (da registrare ed archiviare).
La stazione totale avrebbe funzionato ma il tempo in campo sarebbe stato alto.
E il risultato in output sarebbe stato, per forza, un numero discreto e non molto alto di punti battuti.
Quindi abbiamo scelto il LiDAR.
La scelta è ricaduta sul LiDAR da drone, perchè al momento era quanto disponibile.
E perchè parte delle aree era completamente inaccessibile a piedi.
A posteriori, analizzando i dati, nelle aree “camminabili” un LiDAR mobile terrestre, avrebbe avuto, forse, più efficacia.
L’integrazione dei due sarebbe stato perfetto!
LA SQUADRA
Io non ho un LiDAR.
Né un drone che lo possa trasportare.
Quindi ho chiamato in campo i miei amici genovesi di GTer e JP Droni (che al tempo non avevano ancora costituito Lidar Italia) per intervenire con i loro mezzi: un LiAir50 montato su un DJI Matrice 600 Pro.
In campo eravamo in quattro.
Oltre a me c’erano Tiziano Cosso, Jacopo Callà e Rocío de Sebastián Ochotorena che in quel momento stava facendo uno stage professionale da GTer.
Eccoci.

SOPRALLUOGHI
Qui di sopralluoghi ne abbiamo fatti due.
Il primo l’ho fatto io, da solo, per capire le necessità del committente e dare un’occhiata ai luoghi, sia per capirne l’estensione e le caratteristiche.
Il secondo l’abbiamo fatto insieme a Tiziano e Paolo Scuteri, altro fondatore di JP Droni, per entrare nello specifico dei risultati ottenibili dal rilievo (precisioni e punti al suolo) e della logistica.


Un DJI Matrice 600 non è un drone piccolo.
Una sua elica è grande quanto tutto il mio DJIPhantom Pro!
Quando decolla fa una mezza bufera ed ha bisogno di spazio per salire in aria.
Trovare i punti di decollo, atterraggio, pilotaggio e posizionamento della stazione di terra non è stato banale.
Abbiamo trovato alcune opzioni, da valutare concretamente in campo al momento dei rilievi.
Tutto pronto, si parte!
IN CAMPO
Il rilievo complessivo è durato circa 7 ore.
BASI DI DECOLLO/ATTERRAGGIO E STAZIONI DI CONTROLLO
L’attrezzatura portata in campo non è stata poca.
Ti faccio una breve lista sperando di non dimenticare niente:
- Cassa per il DJI Matrice 600;
- Cassa per il LiAir250;
- Cassa per due set di batterie extra per il drone (12 batterie) e caricatore;
- Generatore per ricaricare le batterie in campo;
- Base Station (Stazione GPS per l’aqcuisizione dei dati grezzi da usare in post processing) + PC;
- Tavolo da campeggio per pc e strumenti di controllo.
In più c’è da aggiungere:
- Target e ricevitore GNSS terrestre (per punti di appoggio del rilievo aerofotogrammetrico e controllo della restituzione LiDAR);
- Drone e batterie per l’acquisizione aerofotogrammetrica.
Insomma era un po’ di roba ed allestire le basi a terra in un territorio poco accomodante non è stato immediato.
Abbiamo scelto due punti in modo da poter controllare il drone in volo nella copertura di tutta l’area.
Uno in basso, a pochi metri dal mare, in una location oggettivamente invidiabile.

Ed uno in alto, in una zona di parcheggio dove la vegetazione lasciava un po’ di tregua.

I VOLI
Prima di volare ci sono stati alcuni step da fare:
- montare il LiDAR sul drone;
- preparare la stazione di terra;
- collegare la “base station” del LiDAR al software di acquisizione su PC;
- posizionare la base GNSS che, registrando in continuo i dati grezzi, sarà usata per calcolare, in post processing, tutte le posizioni del drone (e quindi del LiDAR) in volo;
- accendere tutto quanto ed inizializzare il sistema.
Una volta in volo, Jacopo Callà, ha pilotato il Matrice 600 secondo missioni di volo, in parte programmato ed in parte manuale, sull’area che riusciva a coprire mantenendo il contatto visivo.
Se in un volo aerofotogrammetrico è importante mantenere costante la distanza camera-terreno, per non variare eccessivamente il GSD (Ground Sampling Distance), questo rigore non è poi così necessario in un rilievo LiDAR.
La distanza tra l’emettitore ed il terreno influisce sulla densità dei punti a terra.
Un po’ va tenuta sotto controllo.
E volare seguendo l’altimetria del terreno (magari con un DTM di riferimento) è una cosa consigliatissima.
Ma il risultato buono lo ottieni ugualmente anche se non spacchi il “metro di dislivello”.
In tutto i voli sono stati 4.
Ed in alcune zone, un po’ più critiche, il drone ci è ripassato sopra una seconda volta.
Il sistema LiDAR che è stato usato è formato da una “lanterna” che emette un fascio di raggi laser in modo da spazzolare quello che c’è intorno a 360°.
Per efficientare il rilievo, e visto che le cose da rilevare erano sotto il drone, l’angolo di campo per l’acquisizione del laser è stato limitato a 180° (al di sotto!).
E’ comunque molto efficace perchè il cono di copertura è ancora molto ampio e si riescono a rilevare punti che oltre a stare al di sotto del drone stanno anche nelle zone laterali.
Con uno strumento del genere, puoi dimenticarti di verificare la sovrapposizione necessaria tra strisciate adiacenti in un volo aerofotogrammetrico.
FINE DEL RILIEVO E UN PO’ DI AEROFOTOGRAMMETRIA
Beh, non c’è moto altro da dire sul rilievo LiDAR.
L’attività di campo è finita qui.
Prima di andarcene però abbiamo integrato le attività del LiDAR con un volo aerofotogrammetrico.
Perchè?
Per restituire un’ortofoto generale dell’area, richiesta in output e, già che c’eravamo, per fare un confronto tra le nuvole di punti.
La maggior parte dell’area, bosco, non si prestava per niente ad un’elaborazione Structure from Motion.
Ma c’era una parte di scogliera che avrebbe dato ottimi risultati.
In più, l’occasione di un confronto diretto in campo era ghiotta.

Ti risparmio il modo in cui abbiamo fatto il rilievo con drone.
Ne ho già parlato diverse volte (forse un po’ troppe!):
- Target a terra (che abbiamo anche usato per controllare l’output dell’acquisizione LiDAR);
- Misure GNSS;

- Volo (a GSD il più possibile costante);
- Fotografie;
- Software structure from motion;
- E modello 3D.
ELABORAZIONE DEI DATI
Quando rientri in ufficio dopo un rilievo fotogrammetrico, o aerofotogrammetrico, non hai ancora niente di concreto se non un pacchetto di dati da elaborare: fotografie e misure.
Dopo un rilievo laser scanner (generico) hai già il dato rilevato.
La nuvola di punti esiste già.
Anzi, con la tecnologia portata in campo potevamo vedere la nuvola di punti che nasceva in tempo reale durante il volo del drone e l’acquisizione del sensore.
Nonostante questo c’è comunque bisogno di uno sforzo di elaborazione (tuo e dei software/hardware).
Tranne che per alcuni casi e strumenti, un laser scanner ignora totalmente le coordinate ed i sistemi di riferimento.
I punti della nuvola sono a posto uno con l’altro ma non lo sono in senso assoluto.
In aggiunta a questo per un rilievo LiDAR devono essere calcolate, precisamente ed istante per istante, tutte le posizioni dell’emettitore.
Questo lavoro si fa prendendo i dati grezzi del ricevitore satellitare (la base) posizionata a terra, in registrazione per tutto il tempo del volo, ed accoppiandoli con i dati grezzi registrati dal GPS (a doppia frequenza) del drone in volo (o viceversa).
Al termine del processo un software specifico (LiAcquire del pacchetto software di Greenvalley International) ti restituisce le traiettorie georeferenziate del volo.
E siccome la nuvola di punti è collegata ai punti di emissione anch’essa sarà sistemata nella sua posizione 3D (inclusa la correzione della quota, da ellissoidica a ortometrica).
LA NUVOLA DI PUNTI
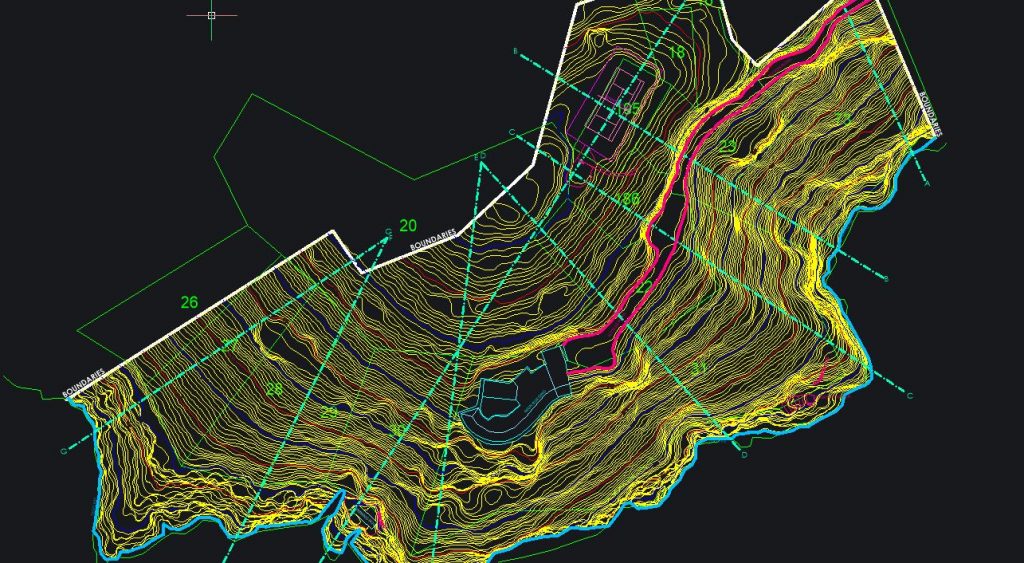
Alla fine di tutto ecco la nuvola di punti georeferenziata da rilievo LiDAR (qui nel sistema cartografico ETRF2000-RDN2008).

I punti sono tanti, circa 80 milioni (contando quelli dell’area del rilievo, in realtà erano molti di più).
E nella nuvola c’è tutto: vegetazione, fabbricati, strade, scogliera e terreno.
Ed è proprio il terreno quello che ci interessa.
La nuvola è stata trattata con il software LiDAR360 (sempre di Greenvallley International) ed i suoi algoritmi di classificazione automatica hanno permesso di estrarre i punti del terreno, il ground.
Eccoli.

Sono: 200.000
Ok, non proprio tanti rispetto al totale.
Sono meno dell’1%.
E capisco che uno avrebbe potuto aspettarsi qualcosa di più.
In realtà i punti bassi (associabili al terreno) sono di più ma l’algoritmo di estrazione del terreno di LiDAR360 ha la caratteristica di classificare “pochi” punti, secondo la sua definizione di ground, ma buoni.
Ed infatti anche questi sono solidi e sufficienti per caratterizzare topograficamente il promontorio del rilievo.
Da qui si sono estratte le curve di livello con passo 50 cm (abbiamo usato un calcolo sulla base dei punti 3D, ma si sarebbe potuto anche passare attraverso un modello digitale di elevazione – che poi sarebbe un ottimo DTM).
Il lavoro è finito con la restituzione 2D, in ambiente CAD dove, oltre alle curve di livello abbiamo eportato i punti del terreno, secondo un maglia 1×1 m (oltre a tenerli più vicini nelle zone ch lo richiedevano) ed aggiunto gli altri elementi caratteristici del sito: fabbricati e viabilità.

LIDAR E AEROFOTOGRAMMETRIA A CONFRONTO
Se ci sono casi in cui un rilievo aerofotogrammetrico se la gioca (ed a volte anche bene) con i risultati di un rilievo LiDAR, ce ne sono altri dove non è così.
Questo è uno di questi.
Ecco la nuvola aerofotogrammetrica.
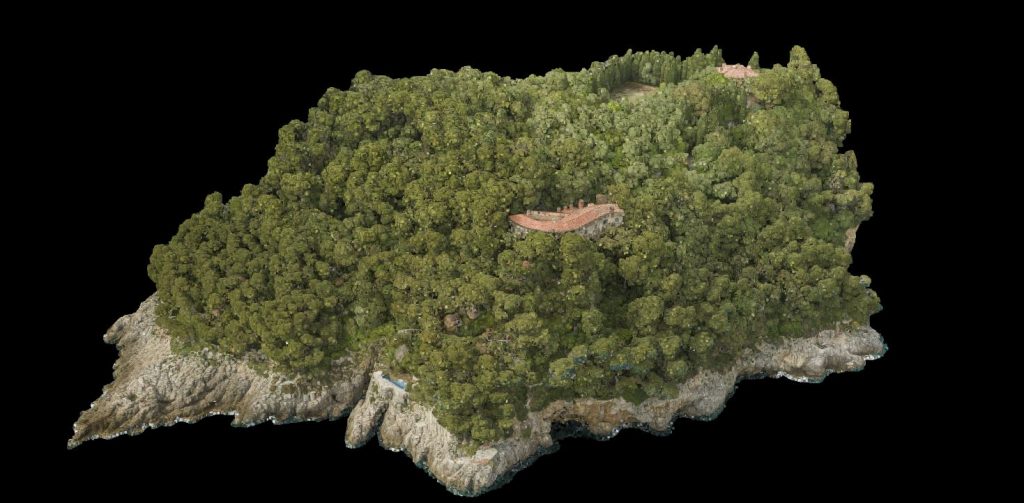
La scogliera era ok.
Lì non c’era vegetazione ed i risultati dell’elaborazione Structure from Motion, sono ottimi.
Lo stesso si può dire per una parte superiore dell’area (dove c’è un’area molto aperta) e per parte del tracciato di accesso alla proprietà.
Ma questa parti sono una percentuale minore dell’intera area del rilievo.
Se va bene, arriviamo al 20%.
E’ nel bosco che si vede la differenza fra una tecnica e l’altra.
Lì l’aerofotogrammetria non può niente.
E’ una tecnica passiva e se guardo alle foto del bosco vedo solo il verde delle chiome!
Niente terreno fotografato = niente dato topografico vero…
Qui sotto ti metto la stessa sezione presa dalla nuvola fotogrammetrica (sopra) e da quella LiDAR (sotto).


Anche se i punti del LiDAR che sono arrivati a terra sono pochi, almeno ci sono!
E sono questi che hanno permesso di raggiungere lo scopo del rilievo, ossia restituire la topografia dell’area.
QUINDI…
Provo a tirare le somme di questa esperienza in campo.
E lo faccio, come in altri casi, sinteticamente e per punti.
- Non è stato un rilievo semplice.
Forse ti saresti aspettato l’eliminazione automatica di tutta la vegetazione, lasciando solo i punti del terreno, ma non è stato così.
Era davvero ostico.
Ma il dato necessario è arrivato! - L’integrazione tra strumenti di misura vince sempre.
Magari non è una considerazione super pertinente con questo lavoro, ma mi sento di farla perchè ci credo tanto.
Anche se il LIDAR è davvero efficace non è detto che debba essere usato sempre.
La tecnologia è piuttosto avanzata ed anche i costi di un servizio del genere ne sono legati.
Se per il tuo lavoro l’aerofotogrammetria da drone va bene, perchè non usarla?
Magari integrata con qualche misura a terra in punti dove la vegetazione è più arcigna… - Un LiDAR non può tutto.
Nell’area del rilievo c’era un dedalo di sentieri e percorsi pedonali al di sotto della vegetazione.
Ecco questi, nonostante la tecnologia, non siamo riusciti a individuarli facilmente.
La macchia mediterranea era troppo fitta.
Mi ripeto, ma l’ideale sarebbe stato avere a disposizione un LiDAR terrestre su zaino e farsi una bella camminata per i sentieri! - Fare un rilievo LiDAR su UAV, non si limita a mandare in aria il drone (che, tra l’altro, per portare un LiDAR deve essere bello carrozzato e pesante) e schiacciare il tasto per iniziare l’acquisizione.
Le cose sono ben più complicate.
Programmazione, preparazione, trattamento delle misure, elaborazione dati, pulizia e classificazione punti, restituzione, …
Spero di essere stato in grado di descrivertele in questo articolo. - Credo che nel futuro ci sarà sempre più LiDAR o comunque strumenti di acquisizione real time di dati 3D (reality capture).
La tecnologia avanza velocissima.
I sensori sono sempre più piccoli e performanti.
I software che gestiscono le nuvole di punti riescono a trattare questo tipo di dati in modo sempre più intelligente per classificare e discretizzare i milioni di dati da trattare. - Ma la topografia classica non deve essere abbandonata.
Abbiamo messo a terra target (usati anche per la fotogrammetria) rilevati con strumenti topografici tradizionali (GNSS).
E l’abbiamo fatto per verificare l’output del rilievo LiDAR e farci un’analisi statistica per stimarne l’accuratezza generale della restituzione.
Senza questo passaggio non avremmo potuto garantire sul risultato. - Al di là di tutto, è davvero una tecnologia affascinante ed i risultati, in alcuni casi, sono sorprendenti!
A presto!
Paolo Corradeghini
INFORMAZIONI DI SERVIZIO
Puoi iscriverti al canale Telegram di 3DMetrica che trovi cercando tredimetrica (telegram.me/tredimetrica) o direttamente a questo link.
Ci sono aggiornamenti quotidiani, informali e dietro le quinte.
Puoi ascoltare le puntate del Podcast di 3DMetrica andando alla pagina PODCAST di questo blog.
Puoi aggiungere la tua email alla Newsletter di 3DMetrica dove, una volta alla settimana, riassumo i post che pubblico sui canali social network, linko l’ultimo articolo del blog, la nuova puntata del podcast e l’ultimo video tutorial.
Usa il box che trovi a destra e nella home page e che dice: “Iscriviti alla Newsletter“.
Ed infine c’è anche il canale You Tube in cui carico video tutorial sull’uso di specifici software per la fotogrammetria e la gestione dei dati tridimensionali.
Se questo articolo ti è stato utile puoi scegliere di supportare la creazione e la condivisione di cotenuti simili diventando un finanziatore di 3DMetrica su Patreon.
Puoi unirti a chi ha già scelto di aiutarmi a rendere il progetto possibile e sostenibile.
Trovi tutte le informazioni e puoi scoprire come fare a questo link.
You might also like







Lasciami un commento!
Leave A Reply