

In questo articolo si parla di fotogrammetria con Photoscan e del processo di creazione della nuvola di punti densa.
La puntata numero sei di questa rubrica a cura dell’Ing. Paolo Rossi, sulla fotogrammetria con il software Agisoft Photoscan, parla del processo di creazione della nuvola di punti densa che permette veramente di avere una percezione tridimensionale relaistica del territorio rilevato o di un oggetto fotografato e ricostruito nella sua forma e dimensione tramite i software ad algoritmi Structure from Motion.
Trovi i link a tutti gli articoli pubblicati sino ad ora in fondo alla pagina.
LA NUVOLA DI PUNTI DENSA
La nuvola densa non è una mera densificazione della nuvola sparsa!
I risultati della fasi di allineamento, calibrazione della fotocamera ed orientamenti interni ed esterni delle immagini, sono utilizzati come input per un nuovo processing.
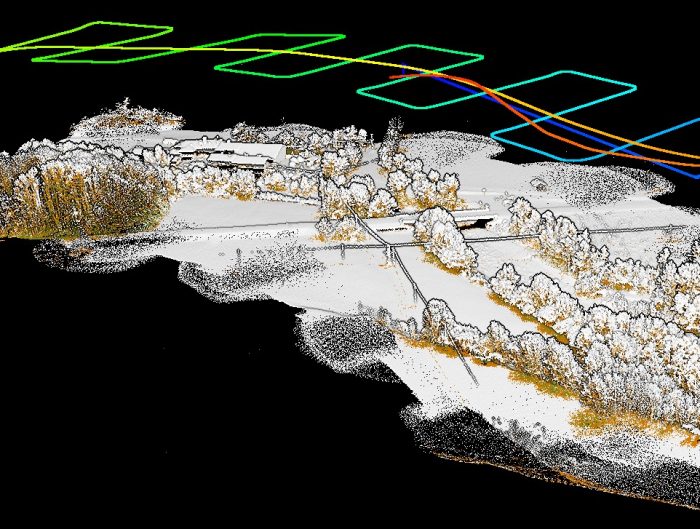
Questa è la fase in cui si può ottenere una ricostruzione tridimensionale con un elevata densità di punti.

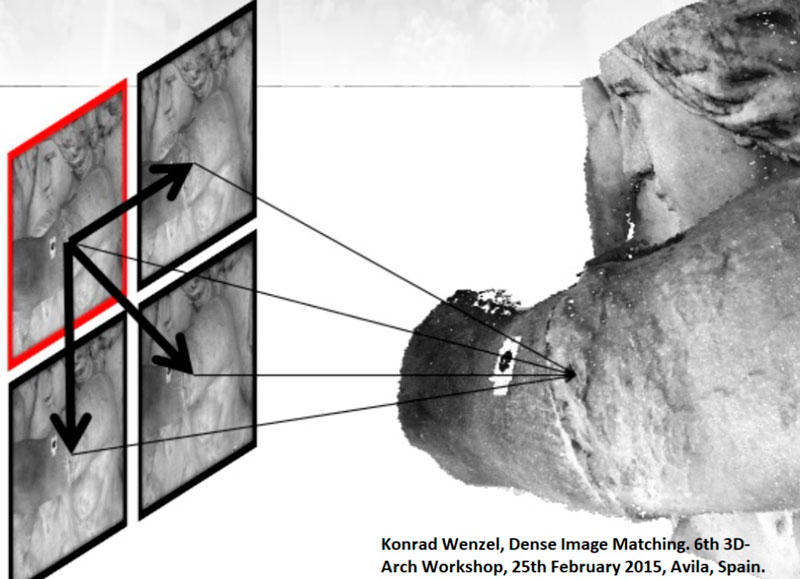
Gli algoritmi di image matching permettono di cercare le corrispondenze pixel to pixel all’interno di una coppia di immagini.
Essi richiedono la costituzione di corrispondenze ed il calcolo delle coordinate 3D è fatto con un approccio di collinearità.
Il prodotto è una mappa di disparità (depth map) che assegna ad ogni pixel dell’immagine un valore relativo di profondità.
Questo porta alla creazione di una nuvola di punti nello spazio oggetto.

L’approccio più diffuso per il matching delle immagini è quello definito Stereo o Multi-Stereo (due o più immagini).
La conoscenza dei parametri di orientamento esterno ed interno di ogni immagine (noti dagli step precedenti) permette la riduzione della complessità in fase di ricerca di corrispondenze, la generazioni di immagini rettificate in cui le corrispondenze sono lungo le linee epipolari.
La costruzione delle mappe di disparità coinvolge algoritmi simili a quelli chiamati di Semi Global Matching.
Questi algoritmi calcolano il costo relativo a diverse corrispondenze (inteso come similarità nel contenuto di colore del pixel) e poi scelgono il costo inferiore ovvero la corrispondenza tra pixel più simili.
Nell’immagine sottostante è esemplificato l’approccio Multi-Stereo.
L’identificazione di corrispondenze in più immagini migliora le performances della ricostruzione.
Per maggiori info sul matching delle immagini potete seguire nFrames, l’azienda cha creato SURE un software specializzato nel matching tra le immagini.
BUILDING DENSE POINT CLOUD
E’ il comando in PhotoScan per la creazione della nuvola densa.
Questa è il processo che richiede il maggior tempo di esecuzione (mediamente dal 50% al 96% del totale con impostazioni da medium a ultra high) ed è l’unico ad utilizzare la GPU.
Nel menu Tools, alla voce Preferences attivare la/le GPU disponibili sul dispositivo, in questo modo saranno utilizzate nella fase di dense cloud generation e le operazioni risulteranno più veloci.
Si può selezionare una porzione dell’intero oggetto e ricostruire la nuvola densa solo per esse (Resize Region).
Il parametro qualità specifica il dettaglio e l’accuratezza geometrica risultanti dalla ricostruzione.
Ultra High significa lavorare con immagini alla risoluzione originale, scendendo con High, Medium, Low, Lowest la qualità delle immagini viene degradata di 4 volte (dimezzata per lato).
La modalità di depth filtering permette di lavorare sugli outliers generati in fase di ricostruzione densa e causati da rumore, immagini sfuocate.
PhotoScan implementa alcuni algoritmi, che rispondono a diverse esigenze:
-
Aggressivo, se l’area di indagine non contiene piccoli dettagli significativi;
-
Mild, se vi sono dettagli di piccole dimensioni che è importante riconoscere nella scena ricostruita;
-
Moderato, genera un risultato intermedio ai due precedenti;
-
Disabilitato, sconsigliato perché la nuvola risultante potrebbe essere troppo rumorosa.
Io di solito lavoro con qualità media, lo trovo un ottimo compromesso per le applicazioni sul territorio in cui le immagini acquisite sono numerose, i tempi di processing sono ragionevoli, i risultati sono densi ed ottengo dei file .ply che riesco a gestire facilmente in altri programmi.
Spero che anche questo articolo di Paolo Rossi sulla creazione della nuvola di punti densa con Photoscan possa esserti utile.
Per dubbi o domande lo spazio per i commenti qui sotto è a tua disposizione!
Colgo l’occasione per ringraziare davvero tanto Paolo Rossi per il tempo che sta dedicando a questa rubrica e per la sua esperienza a disposizione di tutti!
Grazie!
A presto!
Paolo Corradeghini
 Paolo Rossi, ingegnere e PhD in Ingegneria Industriale e del Territorio presso l’Ateneo di Modena e Reggio Emilia, attualmente lavora presso il Laboratorio di Geomatica del Dipartimento di Ingegneria “Enzo Ferrari”, dove si occupa di ricostruzione 3D da immagini.
Paolo Rossi, ingegnere e PhD in Ingegneria Industriale e del Territorio presso l’Ateneo di Modena e Reggio Emilia, attualmente lavora presso il Laboratorio di Geomatica del Dipartimento di Ingegneria “Enzo Ferrari”, dove si occupa di ricostruzione 3D da immagini.
Laboratorio di Geomatica
Dipartimento di ingegneria Enzo Ferrari, Università degli studi di Modena e Reggio Emilia
Via Pietro Vivarelli 10, Modena
Tel: 059 2056297
Cell: 3457054511
Email: paolo.rossi at unimore.it
Profilo Linkedin
Ho pubblicato un video sul canale You Tube dove parlo della generazione della nuvola di punti densa:
You might also like





Lasciami un commento!
Leave A Reply