
In questo si parla dell’aspetto della sicurezza legata ai droni approfondendo l’argomento dei sistemi radar in uso per la localizzazione dei mezzi aerei in volo.
Dopo il suo primo articolo “Droni e Sicurezza“, che trovi a questo link, Flavio Angoli è tornato a trovarmi nelle pagine di questo blog con un nuovo articolo sulla sicurezza dei droni.
Ed io non posso che esserne molto contento!
Ringrazio Flavio per il tempo che ha dedicato a scrivere il suo contributo e per averlo voluto, anche questa volta, condividere con me e con i lettori del blog.
Questo per me è un gesto molto bello, sia umano che professionale, e sono onorato di ricevere conttributi di valore, spontanei e disinteressati, da poter condividere in queste pagine, proprio come questo di Flavio a cui ti lascio!
DRONI E SISTEMI RADAR
In questo si parla dell’aspetto della sicurezza legata ai droni approfondendo l’argomento dei sistemi radar in uso per la localizzazione dei mezzi aerei in volo.
Nello scorso articolo ti ho parlato di rapporti ANSV, a grandi linee della pericolosità degli APR e della tecnologia Geo-Fencing.
Oggi voglio parlarti del sistema AeroScope introdotto da DJI e del sistema polacco Droneradar (con il sistema ADS-B) per il controllo e la sicurezza dei nostri cieli, visto il continuo incremento di vendite e il conseguente utilizzo di droni sia in ambito lavorativo, che in ambito ludico/sportivo.
Come ben sappiamo i droni ultimamente godono di un’attenzione maggiore rispetto a qualche anno fa.
Attenzione è il termine giusto che ha fatto suonare il campanello d’allarme a produttori di questa tipologia di mezzi e ai gestori del traffico aereo (sia in competenza legislativa che operativa).
La continua emergenza terroristica, che ha innalzato i livelli di guardia verso ogni mezzo che può possibilmente offendere, ha messo i droni sotto una speciale lente d’ingrandimento.
Anche la cronaca negli ultimi tempi non si è risparmiata nel descrivere incidenti, guasti o malfunzionamenti di droni che sono successivamente caduti in testa a persone, o recato comunque danni a cose.
AEROSCOPE DJI

DJI si è posta come uno degli attori principali per arginare il problema di ingressi non autorizzati in spazi aerei controllati/zone segregate/no fly zone etc.
Come abbiamo visto nel precedente articolo con la tecnologia Geo-fencing ora la casa cinese affianca anche un sistema di monitoraggio dei propri mezzi volanti, una sorta di “radar” che identifica i droni in volo sugli obiettivi sensibili, nelle no flight zone in tutti gli spazi aerei in genere.
Gli enti di assistenza al volo possono installare in prossimità di aeroporti l’apparato AeroScope (antenne, monitor, decoder etc.) per poter analizzare nel dettaglio tutto il traffico drone attorno all’area prestabilita.
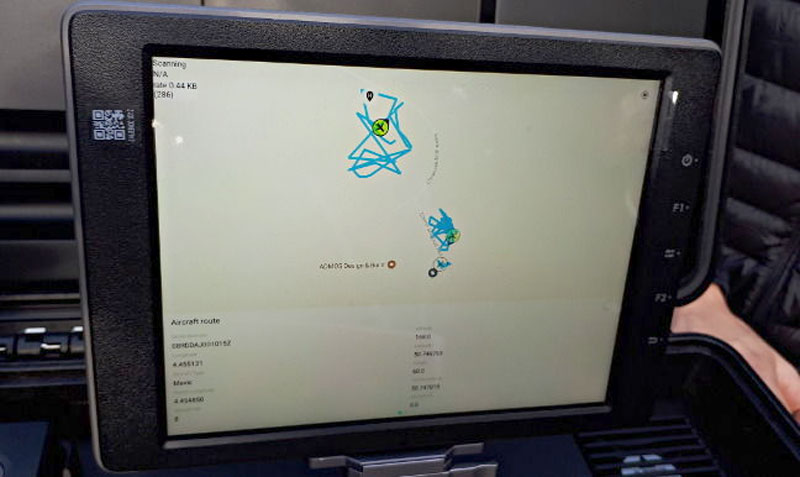
In realtà non si tratta di un radar, nonostante siano visibili sulla mappa del monitor la localizzazione dei droni e il tracciato di volo da loro eseguito come in un classico sistema di tracciamento per aeromobili.
Il sistema utilizza il medesimo canale di comunicazione radio tra il drone e il radiocomando per trasmettere informazioni riguardo il numero di serie (con le generalità del pilota/operatore), la telemetria: che include posizione, altitudine, velocità orizzontale/verticale e la direzione del mezzo.
Per fare questo vengono poste (per la versione fissa) una o più antenne, facendole lavorare in ricezione, nell’area oggetto di “protezione”, oppure si possono allestire postazioni mobili contenute in una valigetta ed alimentate, se necessario, a batteria: in questo modo si possono creare in pochi minuti centri di monitoraggio per mettere in sicurezza ad esempio manifestazioni e concerti.
Il modo operativo non necessita di alcuna modifica al mezzo (montaggio di transponder, chip etc).
Il sistema, agendo come descritto prima, non necessita di un’attivazione da parte del pilota, rendendo il tutto automatico e trasparente.
Il problema di AeroScope è evidente: al momento è in grado di rilevare solo i droni DJI e quelli che operano con Wi-Fi aperto, ma non ancora i sistemi di altre marche.
Bisogna anche ammettere che quasi i due terzi dei droni in circolazione sono proprio Dji.
Sembrerebbe comunque che il colosso cinese si stia muovendo per unificare l’identificazione di tutti i droni, compresi quelli non proprietari.
AeroScope potrebbe quindi apparire come una delle soluzioni più economiche per gli operatori di droni e allo stesso tempo mantenere uno standard di sicurezza, funzionalità e privacy degli stessi piloti estremamente alto, insomma farebbe il suo lavoro.
DRONERADAR

DroneRadar è un’ applicazione DAMS (Drone Awareness and Monitoring System) si pone come sistema atto a migliorare la sicurezza dello spazio aereo fornendo soluzioni per eseguire, monitorare e integrare le operazioni con i droni con il traffico aereo nei cieli europei, con uno speciale occhio di riguardo per le no fly zone su città/aeroporti ed obiettivi particolarmente sensibili.
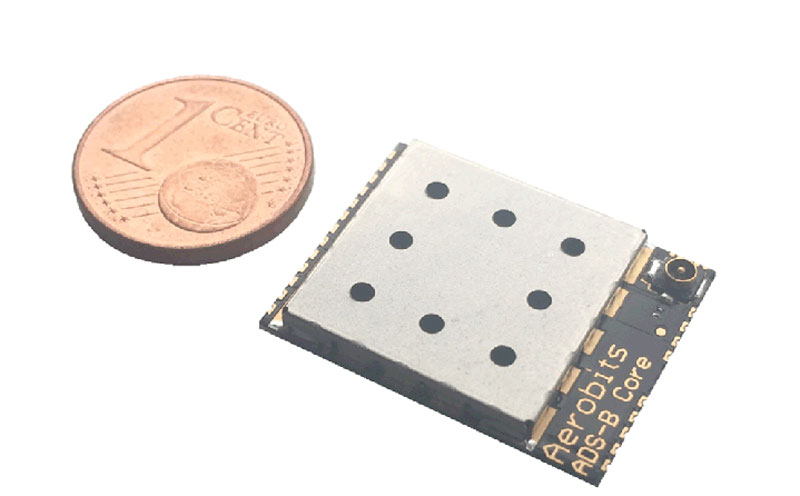
Il progetto coinvolge quattro aziende polacche: FlyTech UAV per quanto riguarda la parte di integrazione del sistema sugli APR, la Droneradar per il data management e la Aerobits per lo sviluppo di ricevitori micro ADS-B e CreoTech, un’azienda specializzata nella strumentazione per l’industra aerospaziale.
A differenza di AeroScope, Droneradar utilizza il sistema ADS-B che prevede l’utlizzo di micro ricevitori, che utilizzano questo tipo di tecnologia, a bordo.
Come funziona la tecnologia ADS-B?
Qui sotto la spiegazione video del sistema
L’apparato ADS-B (Automatic Dependent Surveillance-Broadcast) consiste in un ricevitore ed un trasmettitore, montati su un aeromobile, che permettono lo scambio di dati relativi al volo.
Ogni aeromobile, ricevendo il segnale GPS, definisce la sua posizione nello spazio, integra questa informazione con vari dati su velocità, piano di volo, status del volo ed invia il tutto periodicamente ed in maniera automatica alle stazioni di terra.
Le stazioni sono controllate dagli enti del traffico aereo che possono vedere in real time le informazioni e le posizioni di tutti gli aeromobili nel loro spazio di competenza su appositi monitor.
L’aeromobile condivide queste informazioni anche con il traffico nelle vicinanze.
La stazione di controllo invierà una serie di informazioni all’aeromobile, quali la situazione del traffico intorno ad esso ed i bollettini meteo.
I vantaggi sono evidenti: il segnale utilizzato è digitale, infatti se questo viene ricevuto correttamente non degrada con la distanza, inoltre il volume di infomazioni trasmettibili con questo sistema sono molte di più rispetto ad altri tipi di tecnologie.
Lo “svantaggio”, come succede per i radar secondari, consiste nel fatto che il sistema ADS-B è una tecnica cooperativa, ovvero che sull’aeromobile deve esserci NECESSARIAMENTE un trasponder ADS-B che comunica con le stazioni di terra, altrimenti la sua presenza non viene rilevata, cosa che invece si può vedere dal radar primario dove i bersagli sono totalmente passivi nel processo di rilevazione.
In questa figura si vede lo schema, a grandi linee, del funzionamento di tutto l’apparato ADS-B.

E qui sotto c’è un video di come funzionerebbe l’apparato in caso di un pericolo di collisione tra un elicottero e un APR.
Droneradar è la prima piattaforma europea, e probabilmente mondiale, che consente l’integrazione del traffico aereo con quello drone, cosa molto più interessante rispetto ad AeroScope.
La piattaforma di sistema non è restrittiva ed è basata su un cloud che consente la registrazione, il monitoraggio e la gestione delle operazioni con l’APR.
Il sistema si basa su semplici concetti facilmente comprensibili sia dagli amatori che per gli operatori professionali (implementato da più funzionalità).
Droneradar è pienamente operativo in Polonia da dicembre 2015.
Nel corso del primo anno, l’applicazione mobile è stata scaricata e utilizzata da oltre 20.000 utenti (iOS e Android).
Qui sotto c’è il ricevitore per la stazione di terra ADS-B del sistema Droneradar

E qui il ricevitore micro ADS-B del sistema Droneradar da installare sull’APR
COME FUNZIONA DRONERADAR?
Droneradar utilizza i dati ufficiali di PANSA (Agenzia polacca per i Servizi di navigazione Aerea) così che gli spazi aerei nell’applicazione siano omologhi a quelli reali.
Sullo schermo del proprio dispositivo mobile, l’utente può vedere la limitazione dello spazio aereo agli operatori APR, al fine di proteggere i CTR e le ATZ.
Il sistema mostra anche eventi speciali come le operazioni HEMS (elisoccorso).
L’App controlla automaticamente lo spazio aereo analizzando i dati forniti dall’utente.
In base alle regole dello spazio aereo interessato, l’utente può scegliere una delle tre categorie di peso (<0,6Kg / 0,6-25Kg / 25-150Kg).
Il sistema abbina automaticamente le restrizioni e le informazioni di spazio aereo visualizzate in base alla categoria di peso selezionata.
Le tre luci poste nella parte superiore dello schermo informano l’utente su una possibile prosecuzione del volo senza ulteriori restrizioni; non è infatti possibile procedere senza le istruzioni necessarie da parte della torre.
Esempio per un volo in CTR tramite l’applicazione
1) il pilota effettua il login nell’App ed inserisce i dati del volo che andrà ad effetutare;
2) Il pilota tramite un percorso diretto chiama la Torre di Controllo che ha competenza su quello spazio per ottenere l’autorizzazione al volo;
3) A seconda della decisione del controllore del traffico aereo, il pilota visualizzerà uno dei seguenti messaggi:
- Accettato (clearance ottenuta, icona verde chiaro);
- Rifiutato (vietato il volo, icona grigia);
- Accettato con modifiche (spazio ottenuto con restrizioni impostate dal controllore del traffico aereo, icona verde scuro);
- Rifiutato con modifiche (vietato il volo, l’operazione può iniziare in un secondo momento impostato dal controllore del traffico aereo).
4) Una volta terminato il volo il pilota ha l’obbligo di chiamare la torre di controllo per comunicare l’avvenuto atterraggio e conclusione della missione.
L’Applicazione richiede un dispositivo mobile come uno smartphone o un tablet, dotato di GPS ed accesso ad Internet funzionando appunto con una tecnologia di broadcasting.
Chiaramente, DroneRadar è una soluzione che molti operatori APR e ATC hanno aspettato ed ha un enorme potenziale per le procedure di strutturazione necessarie per integrare le operazioni UAV nel controllo di tutto il traffico aereo.
Con questo sistema gli enti di assistenza al volo europei e le altre autorità avrebbero finalmente la supervisione delle operazioni APR registrate inserite in un contesto più ampio di traffico aereo/aeroportuale.

L’aeroporto di Varsavia Babice, che supporta oltre 40.000 operazioni di aviazione generale scuola/turistica ogni anno, è stato collegato a Droneradar.
L’accordo relativo all’accesso al sistema è stato firmato tra Agenzia polacca per i Servizi di navigazione Aerea (PANSA) e il gestore dell’aeroporto, Centro servizi logistici (CUL), appartenente al Ministero dell’Interno e dell’Amministrazione.
Gli utenti principali del piccolo scalo sono elisoccorso polacco, Polizia, Aeroclub, scuole private di aviazione generale e alcune società di lavoro aereo.
Ora, ottenere il permesso per un volo con un drone nella parte settentrionale di Varsavia (ATZ EPBC) è stato semplificato e digitalizzato.
In conclusione dopo averti illustrato due di alcuni sistemi possibili spiegandoti le loro peculiarità, voglio darti un consiglio, qualsiasi saranno i parametri e le tecnologie che si adotteranno in futuro (anche dopo il tanto atteso regolamento EASA), ricordati di rispettare gli spazi aerei in qualsiasi parte d’Europa o del mondo ti ritroverai ad operare per lavoro oppure per diletto.
Nel cielo non siamo soli!
A cura di Flavio Angoli
Spero che anche questo articolo di Flavio possa averti dati spunti di riflessione sulla sicurezza dei droni in volo.
Per ogni dubbio e domande, lo spazio qui sotto è a tua disposizione!
Se ti va di contribuire ai contenuti di questo blog con argomenti che riguardano la topografia, i droni, le misure, i software, la cartografia e gli strumenti e ti va di scrivere un articolo da pubblicare in queste pagine, io ne sarei molto contento, oltre che davvero onorato.
Scrivimi su Telegram qui: telegram.me/paolocorradeghini o mandami un’email a paolo.corradeghini[at]3dmetrica.it su quello di cui vorresti parlare.
Questo spazio è a disposizione per la condivisione di contenuti ed informazioni!
A presto!
Paolo Corradeghini
 Sono Flavio Angoli, lombardo (sebino per la precisione), classe 1994.
Sono Flavio Angoli, lombardo (sebino per la precisione), classe 1994.
Da sempre affascinato dal mondo aeronautico, inizio dalle simulazioni di volo in cameretta per finire a conseguire un attestato di volo VDS a 19 anni.
Mi avvicino al mondo dei droni nel 2013 decidendo, dopo due anni di test, schianti, fallimenti e soddisfazioni, di fondare Zenith – Aerial Solutions un mio personale progetto lavorativo dove mi occupo principalmente di rilievi fotogrammetrici ed ispezioni.
Parallelamente avverto il bisogno di voler trasmettere la passione per i droni e la cultura aeronautica in genere agli altri (non smetterei mai di parlarne!) ed a Luglio 2017 divento istruttore di volo.
Entusiasta delle nuove tecnologie e delle loro applicazioni, EXCELSIOR! è il motto che mi guida nella vita.
Attualmente continuo la mia esperienza lavorativa nel campo fotogrammetrico e collaboro con una scuola di volo come istruttore.
Lascia un commento